
Quando abbiamo trattato dell’algebra geometrica 2D, abbiamo capito che i bivettori sono in grado di ruotare i vettori. Siamo curiosi di verificare se la cosa funziona anche in 3D.
Calcoliamo il prodotto tra un vettore ed un bivettore: il vettore si può scomporre in una componente nel piano del bivettore  ed una perpendicolare ad esso. Dato che non possiede una forma, possiamo rimodellare il bivettore in modo che risulti
ed una perpendicolare ad esso. Dato che non possiede una forma, possiamo rimodellare il bivettore in modo che risulti 
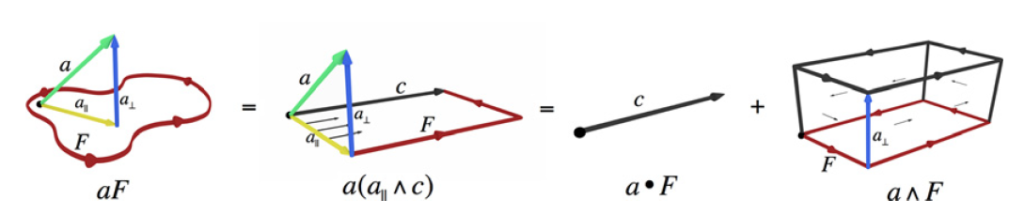
Il risultato del prodotto sarà composto da due parti: il vettore ruotato di  nel piano di F ed il trivettore
nel piano di F ed il trivettore  .
.

Quindi effettivamente il bivettore ha ruotato la componente del vettore che giaceva nel suo piano, ma ha anche generato un volume che, per la rotazione che andiamo cercando, rimane … indigesto.
Se proviamo a scambiare i fattori, la rotazione di si inverte, ma il volume rimane identico.
Senza farci venire ulteriori mal di testa, la soluzione è già stata enunciata quando abbiamo parlato di rotori: il prodotto a sandwich  è quel che ci vuole per generare una rotazione pura e far sparire il trivettore.
è quel che ci vuole per generare una rotazione pura e far sparire il trivettore.



con  perché
perché
 ruotato nel piano di
ruotato nel piano di  di
di 
e dopo lunghi e noiosissimi calcoli, otterremo la matrice di rotazione dei quaternioni:
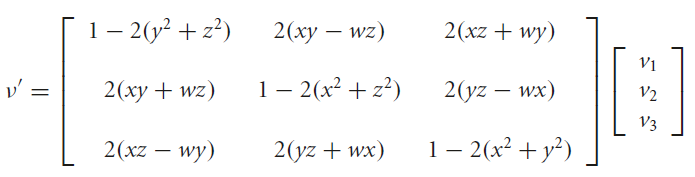
che dimenticheremo molto volentieri, affidandoci totalmente alla potenza del prodotto a sandwich!
Le rotazioni in 3D NON sono commutative e questo è un importante elemento a favore dell’utilizzo dell’AG, la quale porta la non-commutatività nel suo DNA.
Per calcolare due rotazioni successive, dunque procederemo in questo modo:

rappresenta la prima rotazione e la seconda agirà sul risultato della prima, ovvero:

in 3D (e soltanto in 3D) possiamo identificare un’unica rotazione come risultante delle due sopramenzionate:
![\begin{equation} e^{e_1e_2\: \frac{\pi}{4}} \: e^(e_2e_3\: \frac{\pi}{4}) = [\cos \frac{\pi}{4} + e_1e_2 \sin \frac{\pi}{4}][\cos \frac{\pi}{4} + e_2e_3 \sin \frac{\pi}{4}]](https://geometrica.vialattea.net/wp-content/ql-cache/quicklatex.com-4fa7756c67ad8aa9adb0241fa864ec28_l3.png "Rendered by QuickLaTeX.com")



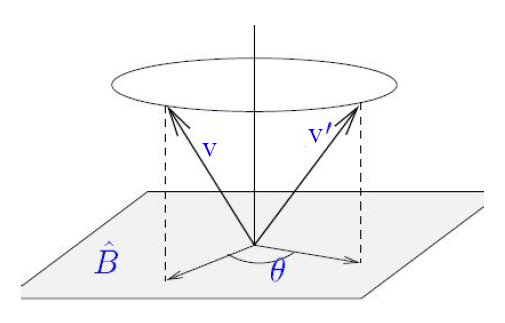
che infine corrisponde ad una rotazione di 120 gradi su un piano che facciamo fatica ad identificare: per la nostra immaginazione è molto più facile visualizzare l’asse di rotazione.
Per trovarlo ricorriamo alla nota dualità: 