
Riflessione di un vettore
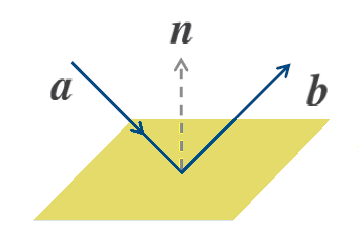
Se vogliamo riflettere il vettore  rispetto al piano individuato dal versore normale
rispetto al piano individuato dal versore normale  , possiamo scomporlo nelle componenti
, possiamo scomporlo nelle componenti  ed il vettore
ed il vettore  riflesso manterrà la componente tangente, invertendo quella normale:
riflesso manterrà la componente tangente, invertendo quella normale:

laddove la componente normale al piano è data dal prodotto scalare di su :

esprimendo il prodotto scalare come semisomma della parte simmetrica del prodotto geometrico:

Riflessione di un bivettore
Supponiamo ora di riflettere un bivettore B, formato ad esempio da  rispetto ad un piano individuato dalla normale
rispetto ad un piano individuato dalla normale  . Lo facciamo riflettendo e :
. Lo facciamo riflettendo e :

ricordando l’espressione  avremo:
avremo:


Quindi occorre fare attenzione: la formula di trasformazione è la stessa, ma nel caso di un bivettore non c’è il segno meno. Questo, peraltro, spiega la differenza tra vettori e bivettori nella trasformazione di parità, che consiste appunto nella riflessione speculare.
In generale, per la riflessione di un multivettore  di grado
di grado  su un multivettore
su un multivettore  di grado
di grado  avremo:
avremo:

Ad esempio i trivettori si trasformano per riflessione allo stesso modo dei vettori, cioè cambiano segno (chiralità).