
A particular and very interesting case of product between vectors occurs when the two vectors  and
and  are unitary, because we can imagine them belonging to the unitary circumference, as in the figure:
are unitary, because we can imagine them belonging to the unitary circumference, as in the figure:
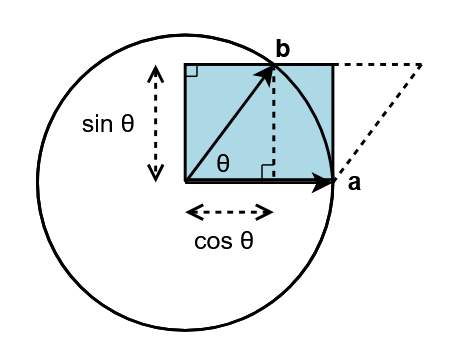
In this figure we see that the terms of the geometric product between the versors and are the scalar  and the blue bivector, i.e. the parallelogram given by extension of on which can be brought back to the rectangle of height
and the blue bivector, i.e. the parallelogram given by extension of on which can be brought back to the rectangle of height  and therefore:
and therefore:

Therefore from the geometric product of two unit vectors forming an angle  a complex number of unitary amplitude arises which we will call rotor indicated with
a complex number of unitary amplitude arises which we will call rotor indicated with  because it has the power to perform a rotation of angle when multiplied (from right) with other carriers.
because it has the power to perform a rotation of angle when multiplied (from right) with other carriers.
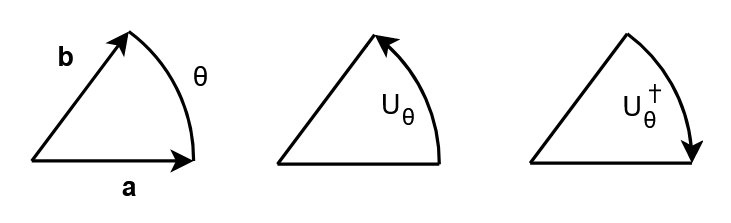 identified by the product of the two vectors and , its conjugate
identified by the product of the two vectors and , its conjugate  represents the rotation in the opposite direction
represents the rotation in the opposite directionThe figure identifies the rotor with the oriented arc, but we could also identify it with the circular sector, because it is directly related to the notion of bivector.
For the property of powers, the product of rotors lying on the same plane is equivalent to an overall rotation equal to the sum of the angles and is commutative: 
Therefore the product between two unit vectors generates a rotor  , that is to say a complex number which – multiplied by any vector – rotates it by an angle equal to the angle between the two vectors:
, that is to say a complex number which – multiplied by any vector – rotates it by an angle equal to the angle between the two vectors:
(paying attention to the position of the multiplier, because it will determine the direction of rotation).
As example: 

and also 
(the factors are swapped since the rotation is in the opposite direction).
Now let’s do something not so clever at first sight.
We divide the rotor in two halves, so that they are “sandwiched” with the vector to rotate and since they are on opposite sides, they must have opposite angles, namely:
The key is a simple observation. Since the bivector  of the plane anticommutes with the vectors lying on it (
of the plane anticommutes with the vectors lying on it ( ), the rotor also “slips” through the vector, changing the sign of the exponent:
), the rotor also “slips” through the vector, changing the sign of the exponent: 
where  is the half an angle rotor. It immediately occurs:
is the half an angle rotor. It immediately occurs:
 )
)
At this point, simply write the complete rotor as the product of its two halves,  , and “slide” the first half past the vector using the identity just found:
, and “slide” the first half past the vector using the identity just found:

And here is the symmetric structure: The vector is “embraced” by the two halves of the rotor, one with angle  and the other with
and the other with  . Updating the notation more compactly:
. Updating the notation more compactly:

where  and
and  is its inverse (the conjugate of the rotor).
is its inverse (the conjugate of the rotor).
This way we can invoke a powerful theorem: each rotation is the composition of two reflections (due to Hamilton and generalized in the Cartan-Dieudonné theorem).
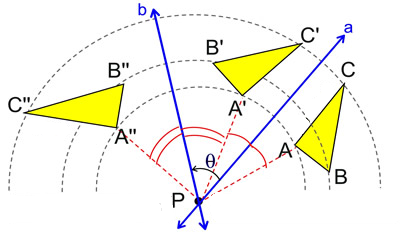
In fact, in the figure we see that the triangle ABC is reflected with respect to a and subsequently with respect to b. The angle formed by a and b is worth half of the overall rotation of the triangle, as can be seen by considering the angles in P.
In the following app you can play with vectors to verify this very important theorem.
So, if we want to express a rotation of angle we will have to identify two vectors in the rotation plane that affect with an angle  and express the composition of the two reflections:
and express the composition of the two reflections:

or more briefly, since the rotor is given precisely by the geometric product of  and
and 

the symmetrical sequence of vectors that make up the rotor is paraphrased with the nice expression “first put on your socks, then your shoes, then take off your shoes and then take off your socks” (socks-shoes property).
Thanks to this theorem the expression  :
:
- is valid for all the dimensions
- it works in spaces having whatever signature (so in spacetime too!)
- it can rotate all the elements, regardless their grade
- in Conformal Geometric Algebra and Projective Geometric Algebra (different flavours of the vanilla GA), the rotor analogue (the motor) also expresses rototranslations not centered on the origin
It will be appropriate to memorize what is now called “sandwich product”!
From Marc ten Bosch page
Rotor’s general expression
A point of elegance in geometric algebra is to express transformations without resorting to those auxiliary elements used so often in classical geometry. We have seen this in the critique of the vector product, which projects a vector perpendicular to the plane of the two factors.
Using the axis to express a rotation that occurs on the plane perpendicular to it is a stratagem that only works in 3D: in higher dimensions it no longer works.
Fortunately this limitation does not exist if we refer to the plane B in which the rotation takes place (bivector) and therefore we will express the rotor as:

if the rotation occurs in a direction concordant with the orientation of the plane we will have:

to compare with the expression referring to the axis of rotation, which only works in 3D:

The rotation in a plane, in the sandwiched form, will be:
